报告详情
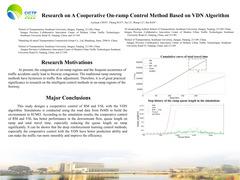
Research on A Cooperative On-ramp Control Method Based on VDN Algorithm
编号:67
访问权限:仅限参会人
更新:2022-07-06 14:28:21
浏览:174次
张贴报告
摘要
At present, the congestion of on-ramp regions and the frequent occurrence of traffic accidents easily lead to freeway congestion. The traditional ramp metering methods have hysteresis in traffic flow adjustment. Therefore, it is of great practical significance to research on the intelligent control methods in on-ramp regions of the freeway. In this work, the mechanism of the active management strategies of the freeway is introduced and the theory of deep reinforcement learning is illustrated. Then, a cooperative control model using a multi-agent deep reinforcement learning algorithm VDN is designed. Simulations are conducted in SUMO compared with other methods. The simulation result shows that the deep reinforcement learning control methods, especially the cooperative control method with VDN algorithm have better performance in the downstream average flow, ramp queue length and total travel time and better prediction ability for traffic conditions, and can make the traffic flow run more smoothly and improve the traffic efficiency.
关键词
暂无
报告人

Luchuan Chen Chen
Southeast University全部评论
重要日期
-
会议日期
07月08日
2022
至07月11日
2022
-
07月11日 2022
报告提交截止日期
-
07月11日 2022
注册截止日期
主办单位
Chinese Overseas Transportation Association
Central South University (CSU)
Central South University (CSU)
联系方式
- Conference Organizing Committee
- ci******@gmail.com
历届会议
-
2024年07月23日 中国 Shenzhen
第24届海外华人交通协会国际交通科技年会(CICTP 2024) -
2021年12月17日 中国 Xi'an
The 20th and 21st joint COTA International Conference of Transportation Professionals -
2019年07月06日 中国 南京
The 19th COTA International Conference of Transportation Professionals -
2018年07月05日 中国 Haidian District
18th COTA International Conference of Transportation Professionals -
2016年07月06日 中国 Shanghai, China
The 16th COTA conference International Conference of Transportation Professionals -
2013年08月14日 中国 深圳市
International Conference of Transportation Professionals


发表评论