报告详情
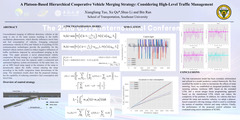
A Platoon-Based Hierarchical Cooperative Vehicle Merging Strategy: Considering High-Level Traffic Management
编号:122
访问权限:仅限参会人
更新:2022-07-06 17:33:05
浏览:136次
张贴报告
摘要
Uncoordinated merging of different directions vehicles at the ramp is one of the main reasons resulting in the traffic oscillations phenomenon, which directly influences travel time and fuel consumption of vehicles. Emerging connected autonomous vehicles (CAVs) and Vehicle to Everything (V2X) communication technologies provide the possibility for the detailed vehicle motion control to reduce negative influences of traffic oscillations imposed by uncoordinated merging at the ramp. This paper presents a novel platoon-based vehicle cooperative driving strategy at a single-lane ramp to achieve smooth traffic flows near the capacity under a connected and automated highway system environment. At the same time, we set an MPC-based ramp signal at the entrance of the ramp to dynamically adjust the traffic volume entering the ramp according to the traffic congestion status downstream of the ramp. The simulation results show that the proposed strategy has the capability of reducing cumulative fuel consumption and travel time.
关键词
暂无
报告人

Tuo Xiangliang
Southeast University全部评论
重要日期
-
会议日期
07月08日
2022
至07月11日
2022
-
07月11日 2022
报告提交截止日期
-
07月11日 2022
注册截止日期
主办单位
Chinese Overseas Transportation Association
Central South University (CSU)
Central South University (CSU)
联系方式
- Conference Organizing Committee
- ci******@gmail.com
历届会议
-
2024年07月23日 中国 Shenzhen
第24届海外华人交通协会国际交通科技年会(CICTP 2024) -
2021年12月17日 中国 Xi'an
The 20th and 21st joint COTA International Conference of Transportation Professionals -
2019年07月06日 中国 南京
The 19th COTA International Conference of Transportation Professionals -
2018年07月05日 中国 Haidian District
18th COTA International Conference of Transportation Professionals -
2016年07月06日 中国 Shanghai, China
The 16th COTA conference International Conference of Transportation Professionals -
2013年08月14日 中国 深圳市
International Conference of Transportation Professionals


发表评论