报告详情
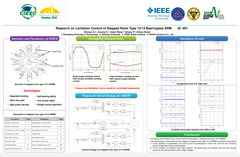
Research on Levitation Control of Stepped Rotor Type 12/14 Bearingless SRM
编号:595
访问权限:仅限参会人
更新:2022-05-22 18:03:49
浏览:257次
张贴报告
摘要
The traditional 12/14 bearingless switched reluctance motor (BSRM) with hybrid stator poles cannot self-start at some specific rotor position due to the two-phase structure. The new stepped rotor type BSRM solves the problem of self-start of the motor by optimization of stator and rotor structure. Based on levitation force control scheme in the traditional BSRM, this paper studies the levitation force control scheme for the new stepped rotor type BSRM. According to the natural decoupling characteristics between levitation force and torque, the independent control scheme, including hysteresis current control method and current chopper control method, is proposed to realize the levitation force and torque control. The levitation and torque control adopts PID and PI controller, respectively, to adjust the error between each parameter and the given quantity. Finally, the correctness of the control strategy is verified by simulation results.
关键词
bearingless switched reluctance motor;levitation-force control;stepped rotor
报告人
FuJinyang
Student 沈阳工业大学全部评论
重要日期
-
会议日期
05月27日
2022
至05月29日
2022
-
02月28日 2022
初稿截稿日期
-
05月29日 2022
注册截止日期
-
06月22日 2022
报告提交截止日期
主办单位
IEEE Beijing Section
China Electrotechnical Society
Southeast University
China Electrotechnical Society
Southeast University
协办单位
IEEE Industry Applications Society
IEEE Nanjing Section
IEEE Nanjing Section
联系方式
- Organizing Committee
- ch******@ces.org.cn
- +86********
历届会议
-
2025年05月16日 中国 Changsha
2025 IEEE 8th International Electrical and Energy Conference -
2023年05月12日 中国 Hefei
2023 IEEE 6th International Electrical and Energy Conference -
2022年05月27日 中国
2022 年电气电子工程师学会电力与能源分会(IEEE PES)年会 -
2021年05月28日 中国 Wuhan
2021中国电力和能源国际会议 -
2018年11月04日 中国
2018中国电力和能源国际会议 -
2017年10月25日 中国 东城区
2017中国电力和能源国际会议


发表评论