报告详情
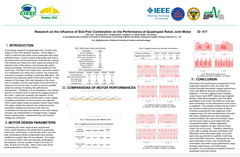
Research on the Influence of Slot-Pole Combination on the Performance of Quadruped Robot Joint Motor
编号:194
访问权限:仅限参会人
更新:2022-05-18 09:40:55
浏览:217次
张贴报告
摘要
The motor requirements of the quadruped robot joint module are low speed, high torque, thin and light. The existing permanent magnet synchronous external rotor motors basically meet this application. However, for this type of motor with the same size limit, how to optimize the design of the motor to achieve high-performance output, there are still few studies. In the robot joint module, the torque-mass density ratio that expresses the motor torque/mass is a very critical motor performance evaluation parameter. Based on the external rotor permanent magnet synchronous motor of the same size, this paper analyzes the influence of different slot pole numbers on the performance of the motor, and studies the electromagnetic and mechanical characteristics of the external rotor surface-mounted permanent magnet synchronous motor with the same pole number and different slot number combination. From the perspectives of motor average torque, cogging torque, winding factor, back-EMF, air gap flux density and unbalanced force, comprehensively analyze and compare the effects of four slot- pole combinations on motor performance. The finite element simulation results show that 30 slots/26 poles is a better and feasible option to achieve high torque, low speed and meet size requirements.
关键词
joint module;permanent magnet synchronous outer rotor motor; torque mass density ratio; number of slots and poles; finite element
报告人

YukeCao
武汉理工大学全部评论
重要日期
-
会议日期
05月27日
2022
至05月29日
2022
-
02月28日 2022
初稿截稿日期
-
05月29日 2022
注册截止日期
-
06月22日 2022
报告提交截止日期
主办单位
IEEE Beijing Section
China Electrotechnical Society
Southeast University
China Electrotechnical Society
Southeast University
协办单位
IEEE Industry Applications Society
IEEE Nanjing Section
IEEE Nanjing Section
联系方式
- Organizing Committee
- ch******@ces.org.cn
- +86********
历届会议
-
2025年05月16日 中国 Changsha
2025 IEEE 8th International Electrical and Energy Conference -
2023年05月12日 中国 Hefei
2023 IEEE 6th International Electrical and Energy Conference -
2022年05月27日 中国
2022 年电气电子工程师学会电力与能源分会(IEEE PES)年会 -
2021年05月28日 中国 Wuhan
2021中国电力和能源国际会议 -
2018年11月04日 中国
2018中国电力和能源国际会议 -
2017年10月25日 中国 东城区
2017中国电力和能源国际会议


发表评论